![(please configure the [header_logo] section in trac.ini)](/chrome/site/khojp.gif)
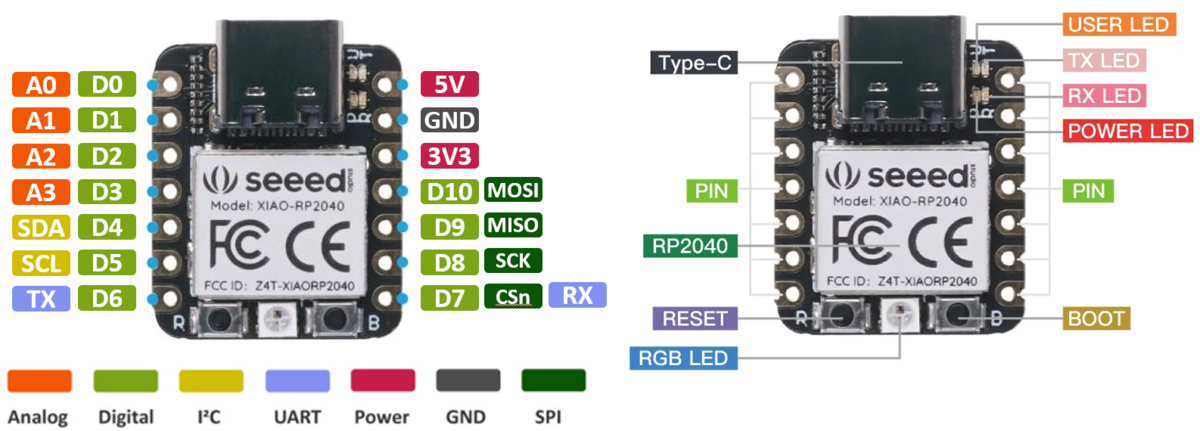
XIAO RP2040
- 2022/11/01 Amazon ¥1,419.-

|
XIAO RP2040 の動作ログ
- USBケーブルで接続し、TeraTerm で開くと MicroPython が動作している
>>> help()
Welcome to MicroPython!
For online help please visit https://micropython.org/help/.
For access to the hardware use the 'machine' module. RP2 specific commands
are in the 'rp2' module.
Quick overview of some objects:
machine.Pin(pin) -- get a pin, eg machine.Pin(0)
machine.Pin(pin, m, [p]) -- get a pin and configure it for IO mode m, pull mode p
methods: init(..), value([v]), high(), low(), irq(handler)
machine.ADC(pin) -- make an analog object from a pin
methods: read_u16()
machine.PWM(pin) -- make a PWM object from a pin
methods: deinit(), freq([f]), duty_u16([d]), duty_ns([d])
machine.I2C(id) -- create an I2C object (id=0,1)
methods: readfrom(addr, buf, stop=True), writeto(addr, buf, stop=True)
readfrom_mem(addr, memaddr, arg), writeto_mem(addr, memaddr, arg)
machine.SPI(id, baudrate=1000000) -- create an SPI object (id=0,1)
methods: read(nbytes, write=0x00), write(buf), write_readinto(wr_buf, rd_buf)
machine.Timer(freq, callback) -- create a software timer object
eg: machine.Timer(freq=1, callback=lambda t:print(t))
Pins are numbered 0-29, and 26-29 have ADC capabilities
Pin IO modes are: Pin.IN, Pin.OUT, Pin.ALT
Pin pull modes are: Pin.PULL_UP, Pin.PULL_DOWN
Useful control commands:
CTRL-C -- interrupt a running program
CTRL-D -- on a blank line, do a soft reset of the board
CTRL-E -- on a blank line, enter paste mode
For further help on a specific object, type help(obj)
For a list of available modules, type help('modules')
>>>
>>> help('modules')
__main__ gc uasyncio/event umachine
_boot lwip uasyncio/funcs uos
_boot_fat math uasyncio/lock urandom
_onewire micropython uasyncio/stream ure
_rp2 mip ubinascii urequests
_thread neopixel ucollections uselect
_uasyncio network ucryptolib usocket
_webrepl ntptime uctypes ussl
builtins onewire uerrno ustruct
cmath rp2 uhashlib usys
dht uarray uheapq utime
ds18x20 uasyncio/__init__ uio uwebsocket
framebuf uasyncio/core ujson uzlib
Plus any modules on the filesystem
>>>
>>> help(rp2)
object <module 'rp2' from 'rp2.py'> is of type module
country -- <function>
PIOASMEmit -- <class 'PIOASMEmit'>
__file__ -- rp2.py
asm_pio -- <function asm_pio at 0x20008580>
const -- <function>
PIOASMError -- <class 'PIOASMError'>
PIO -- <class 'PIO'>
__name__ -- rp2
asm_pio_encode -- <function asm_pio_encode at 0x200085a0>
StateMachine -- <class 'StateMachine'>
Flash -- <class 'Flash'>
dht_readinto -- <function>
_pio_funcs -- {'in_': None, 'y_dec': 4, 'pin': 6, 'iffull': 64, 'gpio': 0, 'not_osre': 7, 'clear': 64, 'rel': <function <lambda> at 0x20008a50>, 'wrap': None, 'x_not_y': 5, 'word': None, 'out': None, 'push': None, 'noblock': 1, 'pull': None, 'wrap_target': None, 'x_dec': 2, 'mov': None, 'irq': None, 'set': None, 'y': 2, 'x': 1, 'null': 3, 'pc': 5, 'invert': <function <lambda> at 0x20008a30>, 'pins': 0, 'not_x': 1, 'not_y': 3, 'ifempty': 64, 'isr': 6, 'pindirs': 4, 'exec': 8, 'label': None, 'status': 5, 'nop': None, 'osr': 7, 'block': 33, 'reverse': <function <lambda> at 0x20008a40>, 'jmp': None, 'wait': None}
>>>
Last modified
2 years ago
Last modified on Apr 13, 2024, 3:41:57 PM
Attachments (1)
- XiaoRP2040.png (398.9 KB ) - added by 2 years ago.
{kind=link}
Download all attachments as: .zip
Note:
See TracWiki
for help on using the wiki.